Exbody2卓越善于模仿的人形机器人,涵盖全身控制
Exbody 2: Advanced Expressive Humanoid Whole-Body Control
这一研究成果,涵盖研究概述、成果展示、团队信息和引用格式等方面。
- 研究概述:提出 Exbody 2,这是一个通用的全身跟踪框架,旨在让现实世界中的人形机器人在执行如人类般富有表现力的动作时保持稳定性。该框架可接受任意参考运动输入并控制人形机器人模仿动作,模型通过强化学习在模拟环境中训练,之后应用到现实场景。它将关键点跟踪与速度控制解耦,利用特权教师策略将精确的模仿技能提炼到目标学生策略中,能够高保真地复制跑步、下蹲、跳舞等动态动作。论文还对关键设计因素进行了全面的定性和定量分析。
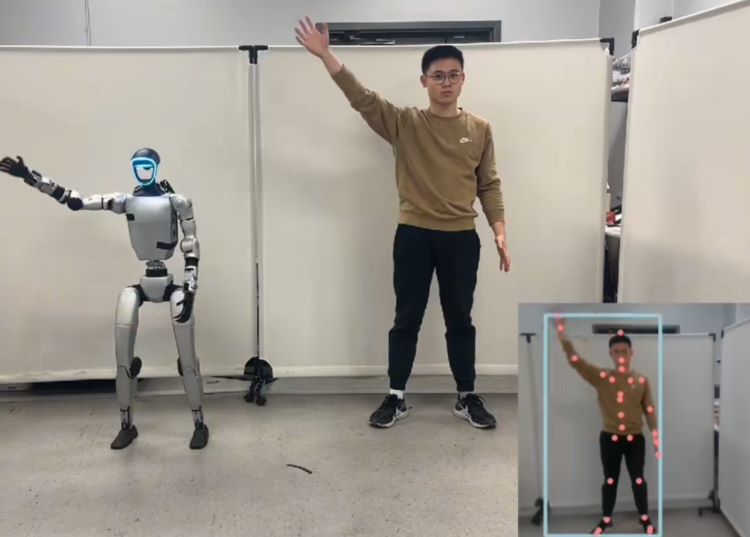
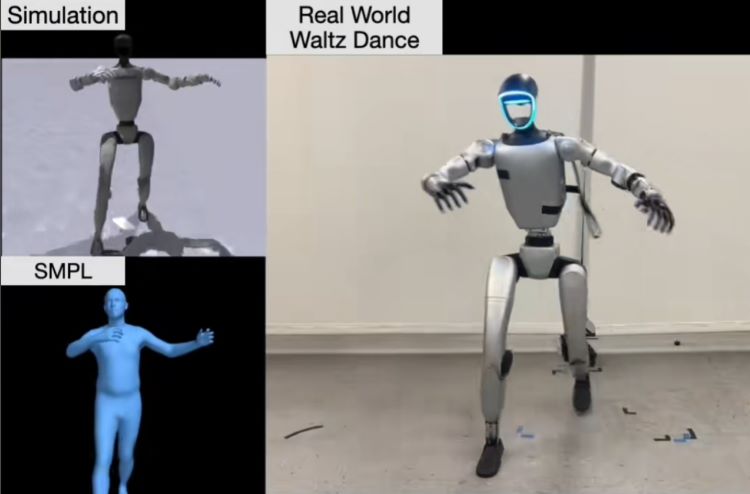
- 成果展示:展示了多种人形机器人全身控制的动作效果,包括侧身移步、跳华尔兹、室内外行走、踱步、挥舞手臂跳舞、画圈跳舞、下蹲、出拳、勾拳、蹲站挥手等。同时呈现了实时全身模仿效果,实时姿态估计代码源自 HybrIK,还有在 Unitree H1 和 Unitree G1 两个人形机器人平台上的仿真结果。
- 团队信息:介绍了项目团队成员,包括 Mazeyu Ji、Xuanbin Peng、Fangchen Liu、Jialong Li、Ge Yang、Xuxin Cheng 和 Xiaolong Wang。
- 引用格式:提供了该研究成果的 BibTeX 引用格式,方便学术引用。