DexGraspVLA: 让机器人抓取技术 “脱胎换骨”
在机器人技术的广袤天地里,一项突破性进展正悄然改变着游戏规则——DexGraspVLA 横空出世!它凭借创新的技术架构,在通用机器人抓取物品任务领域一骑绝尘,稳定性和泛化能力令人咋舌。
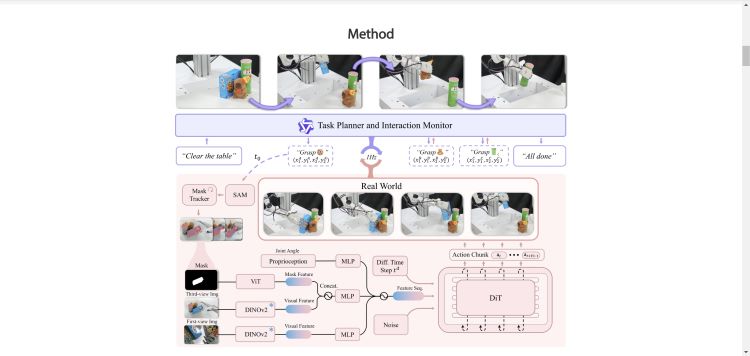
DexGraspVLA的秘诀在于巧妙“组合拳”:预训练的视觉语言模型担任高级任务规划器,扩散策略变身低级动作控制器。这就像给机器人配备了一位“军师”和一名“实战高手”。“军师”基于丰富的预训练知识,制定出精准的任务规划,高瞻远瞩地指挥机器人走向目标物品;“实战高手”则凭借扩散策略的灵活性,根据实时情况微调动作,确保每一次抓取都稳准狠。
这种设计带来的稳定性简直超乎想象。无论物品处于何种复杂环境,形状、质地如何千变万化,DexGraspVLA都能让机器人像训练有素的特工,果断出手、精确抓取。以往困扰机器人抓取的抖动、失误等问题,在它面前都成了“小插曲”。\n\n而其泛化能力更是一绝。它不会被特定场景或物品类型束缚,无论是工业流水线上的零部件,还是家庭环境中的各种杂物,DexGraspVLA都能快速适应,展现出强大的“跨界”实力。这意味着,一个机器人就能胜任多种不同场景的抓取工作,大大提升了机器人的实用性和经济性。
DexGraspVLA的出现,无疑为机器人抓取技术注入了新的活力,让机器人在复杂多变的现实世界中更加游刃有余。它不仅推动了机器人技术的发展,也为未来智能生活和工业自动化描绘了更加美好的蓝图。我们有理由相信,在DexGraspVLA的引领下,机器人将更快走进我们的生活,带来前所未有的便利。